I am a geospatial data scientist with a background in forestry and wildlife biology. I specialize in developing machine learning models to estimate forest attributes. Specifically, I work with three dimensional light detection and ranging (LiDAR) data to estimate forest aboveground biomass (AGB). This site contains a summary of my research, previous work, a resume.
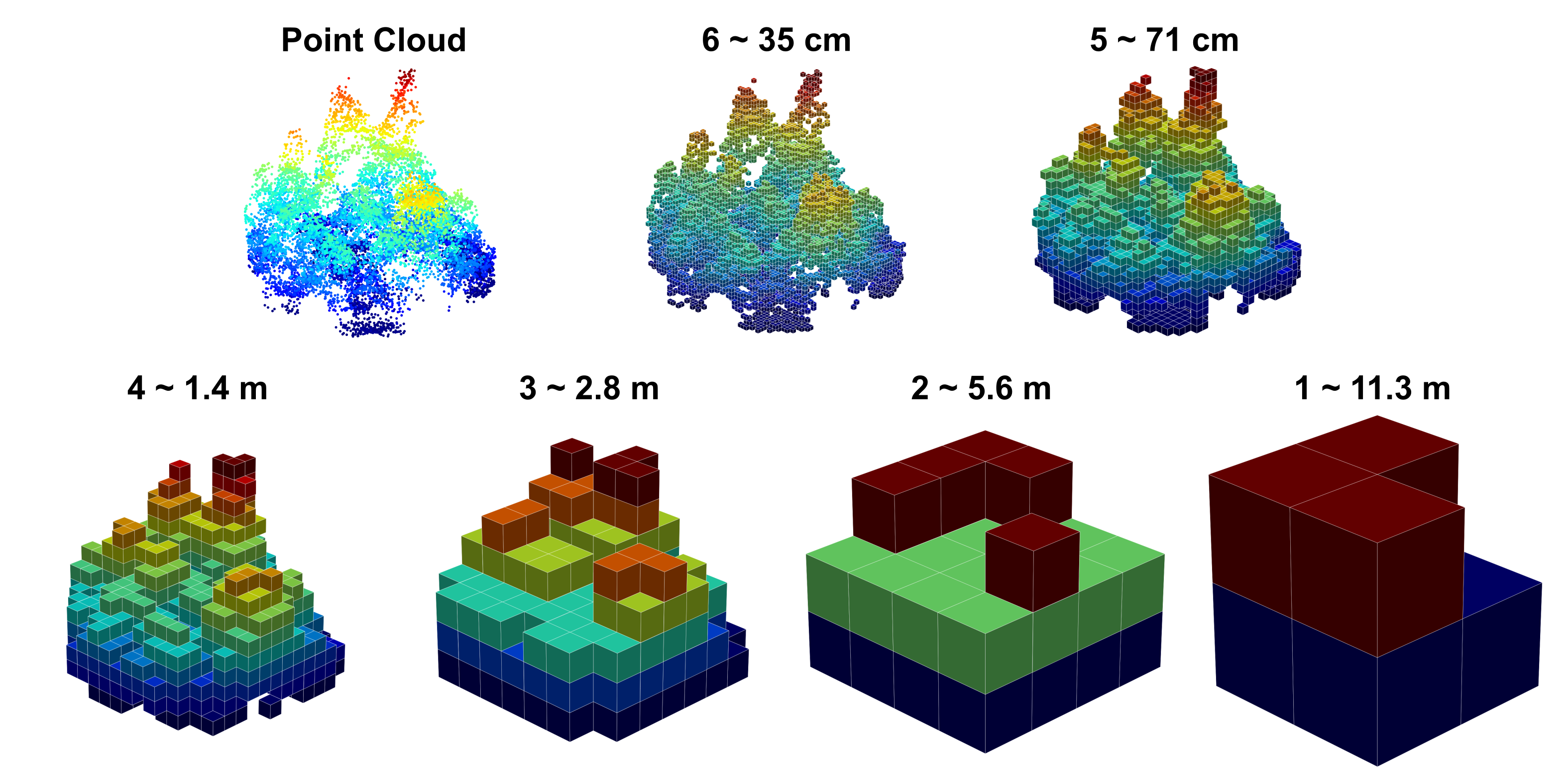
The fundamental unit used to develop forest structure models from LiDAR data is the sample plot. Associating LiDAR data with plot-level tree measurements allows us to build models to estimate forest biomass. This is what a forest sample plot looks like when represented with LiDAR data. My current work is focused on developing relationships between LiDAR data and forest structure using deep learning to estimate forest AGB more accurately across the landscape.